Understanding ARKit Tracking and Detection
Understanding ARKit Tracking and Detection
Understanding ARKit Tracking and Detection
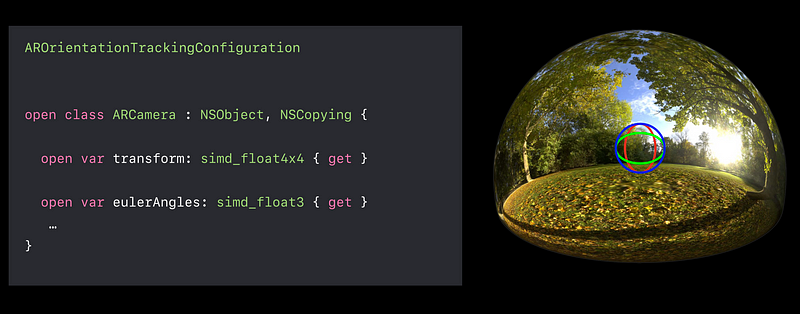
- Tracks orientation only (3 DoF)
- Spherical virtual environment
- Augmentation of far objects
- Not suited for physical world augmentation from different views
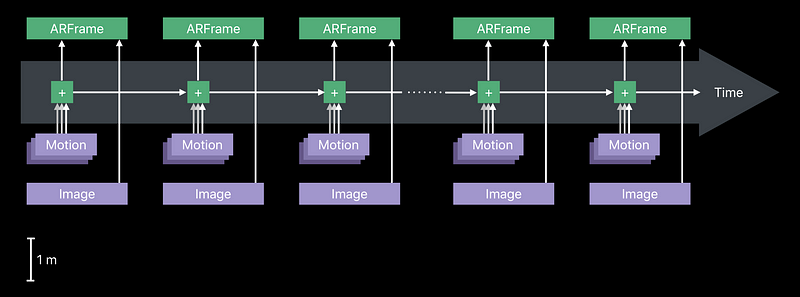
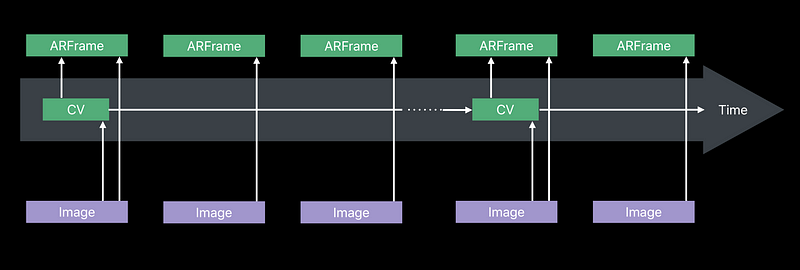
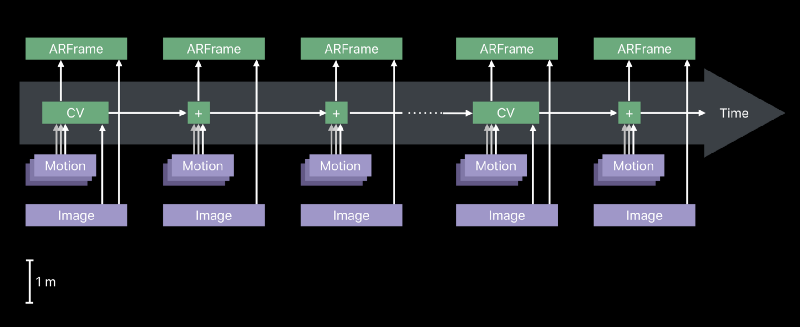
Motion sensorComputer visionMotion data and computer vision- Uninterrupted sensor data
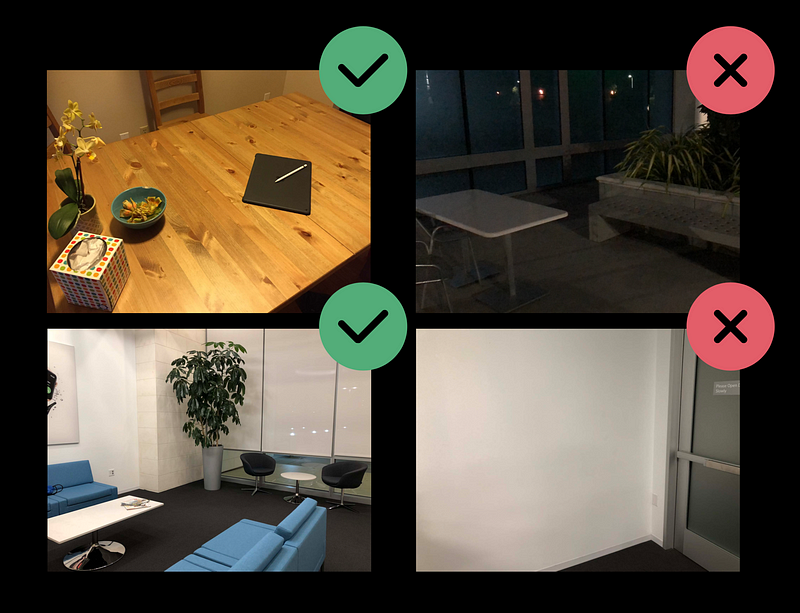
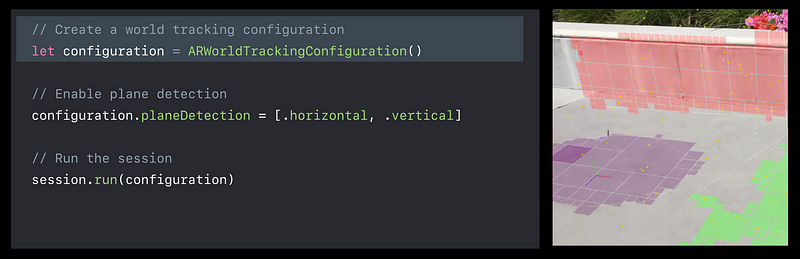
- Textured environments
- Static scenes
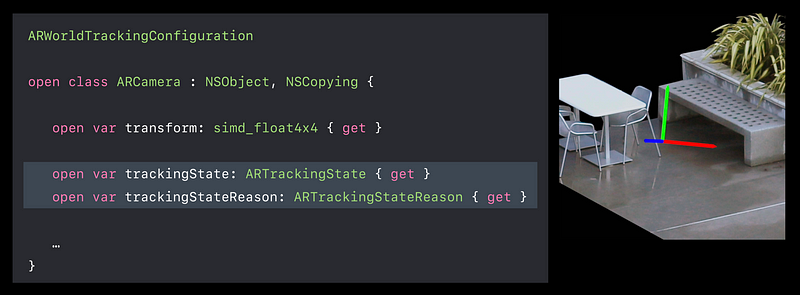
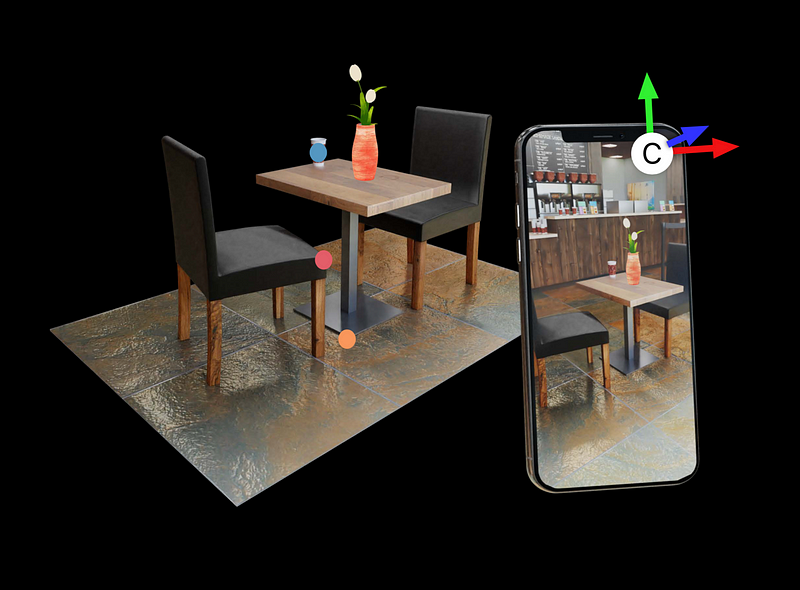
- Tracks orientation and postion (6 DoF)
- Augmentation into your physical world
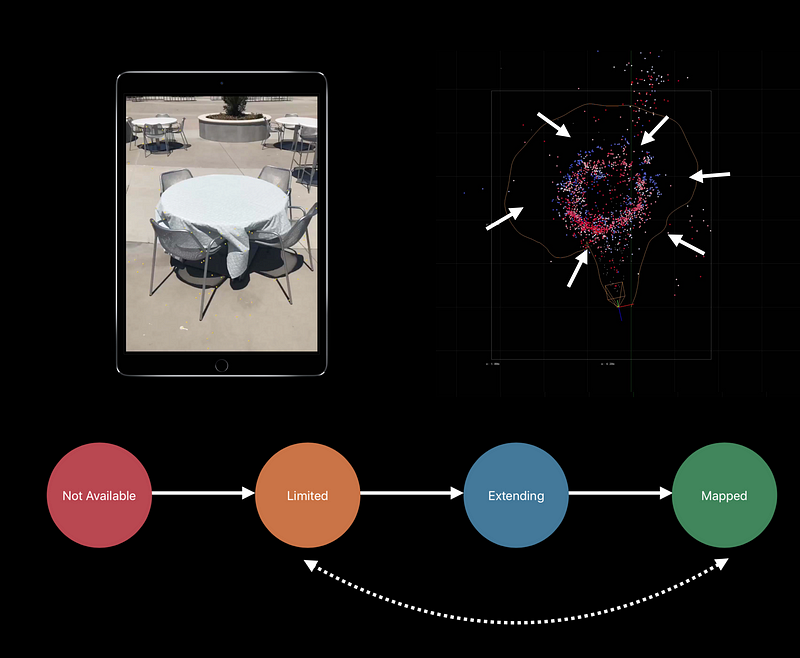
- World Map
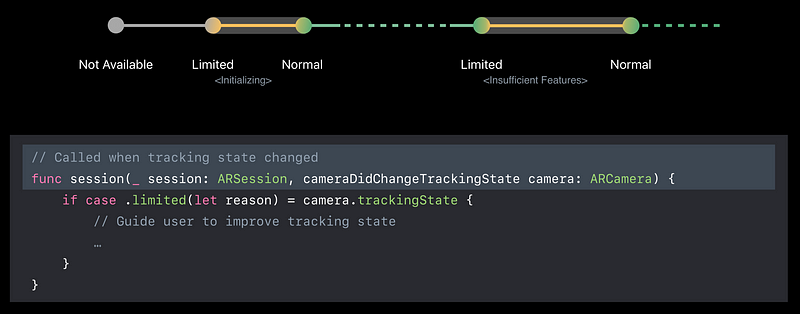
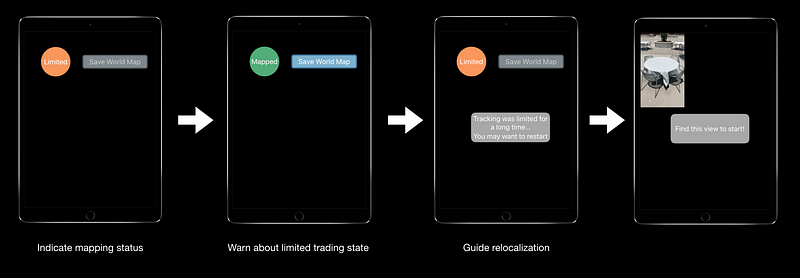
- Guide user to achieve best tracking quality
- Runs on your device only
- Sample ( Building Your First AR Experience )
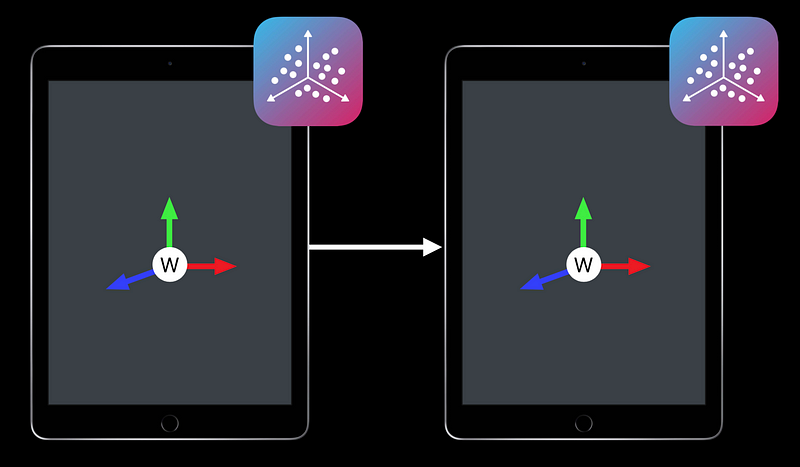
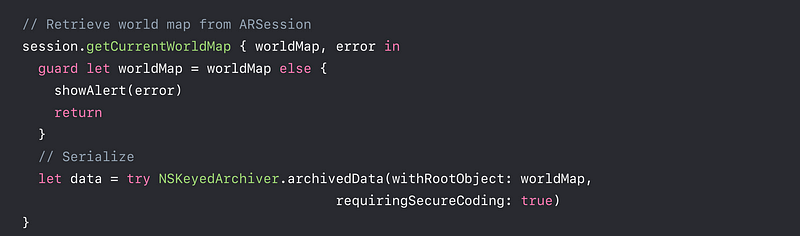
- Acquire a good World Map
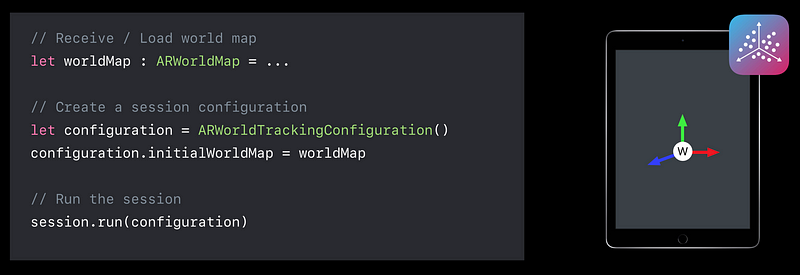
- Share the World Map
- Relocalized to World Map
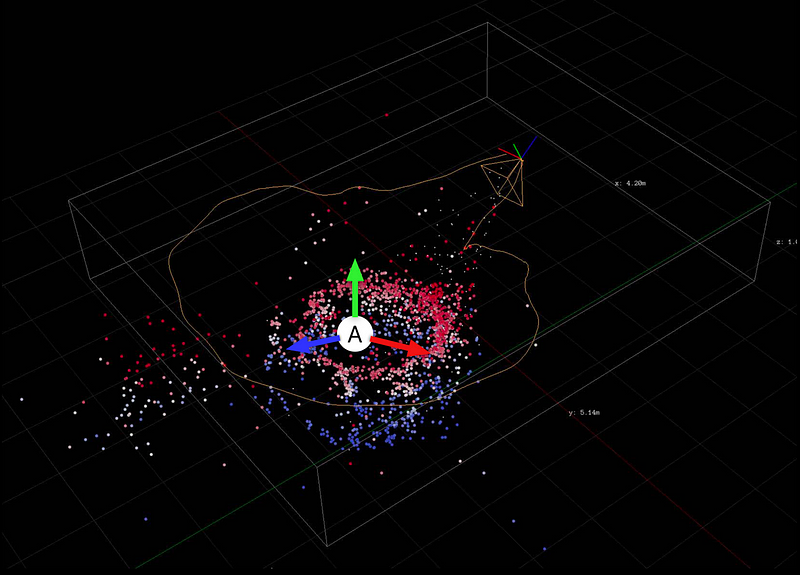
- Internal tracking data
- Map of 3D feature points
- Local appearance - List of named anchors
- Serializable
- Dense feature points on map
- Static environment
- Multiple points of view
- World mapping status
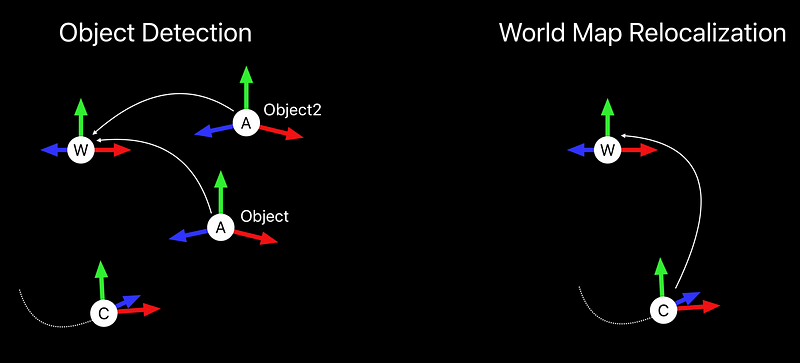
- Before Relocalization
- Tracking state is Limited with reason Relocalizing
- World origin is first camera - After Relocalization
- Tracking state is Normal
- World origin is initial world map
- Only minor changes in environment allowed
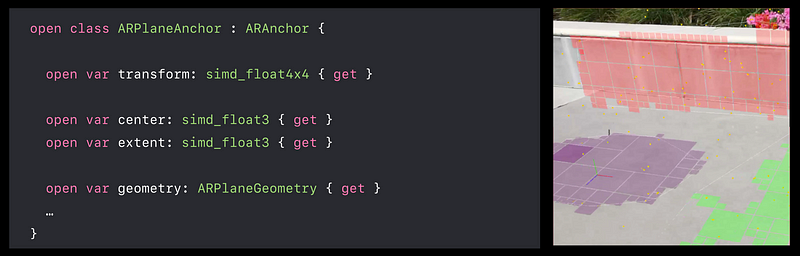
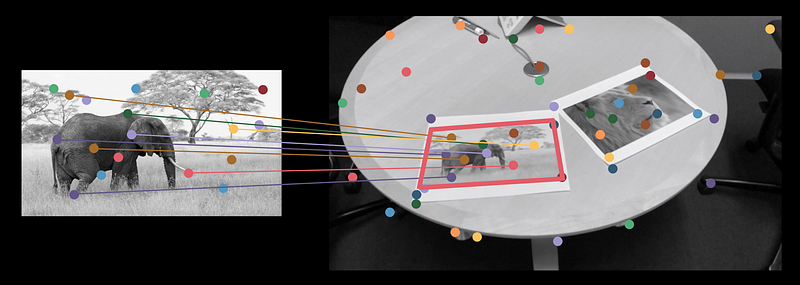
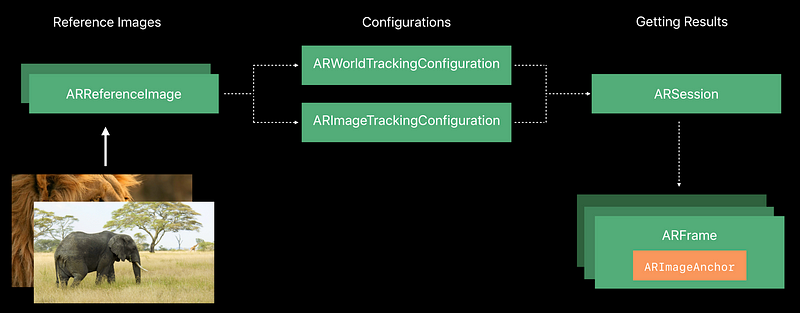
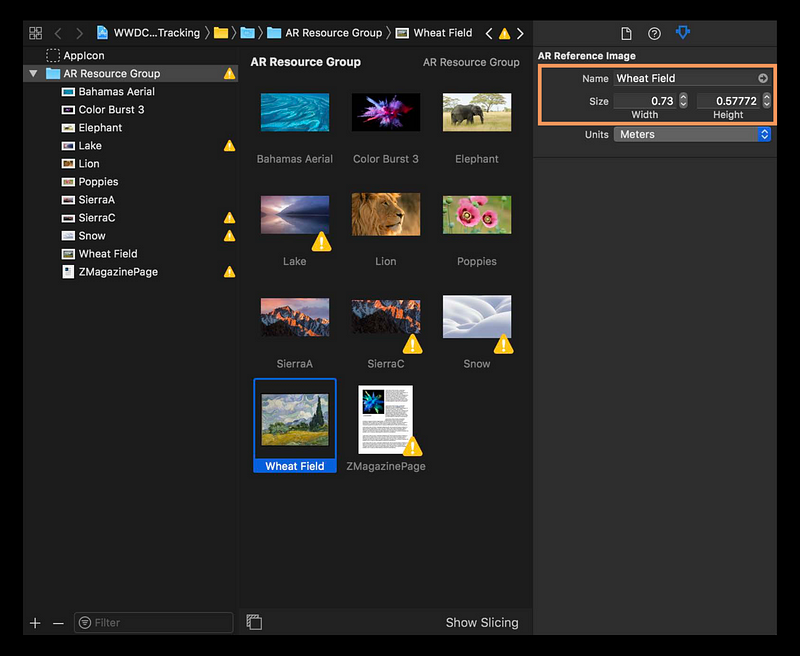
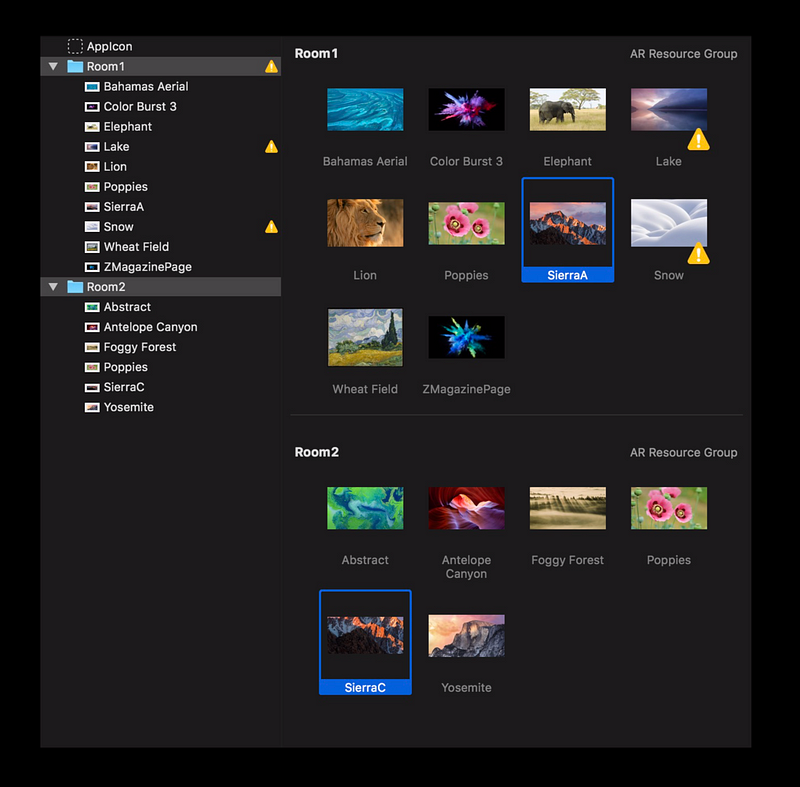
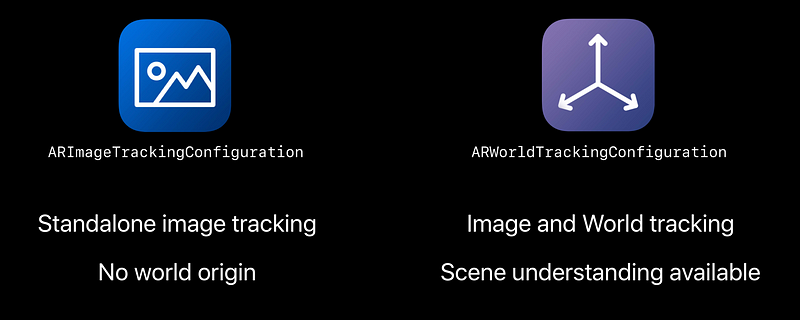
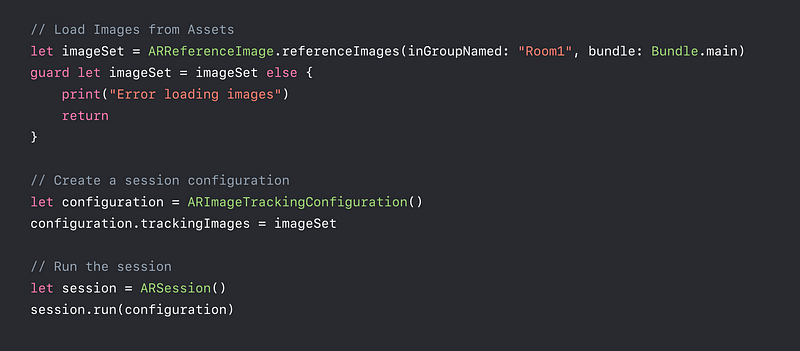
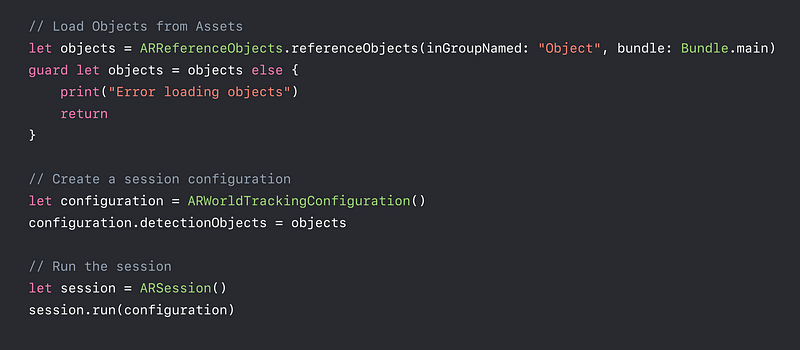
- Create AR Resource Group
- Drag images to be detected
- Set physical dimension for images
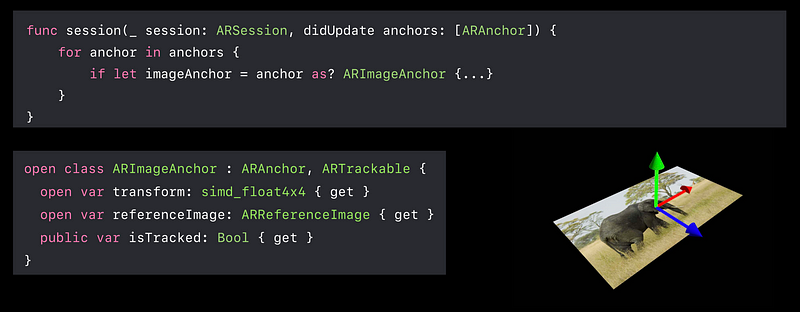
- Physical image size must be known
- Allows content to be in physical dimension
- Consistent with world tracking data
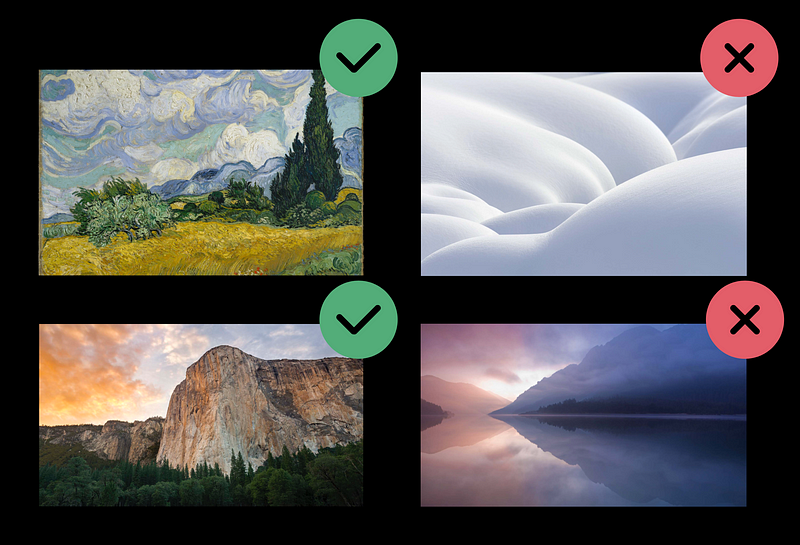
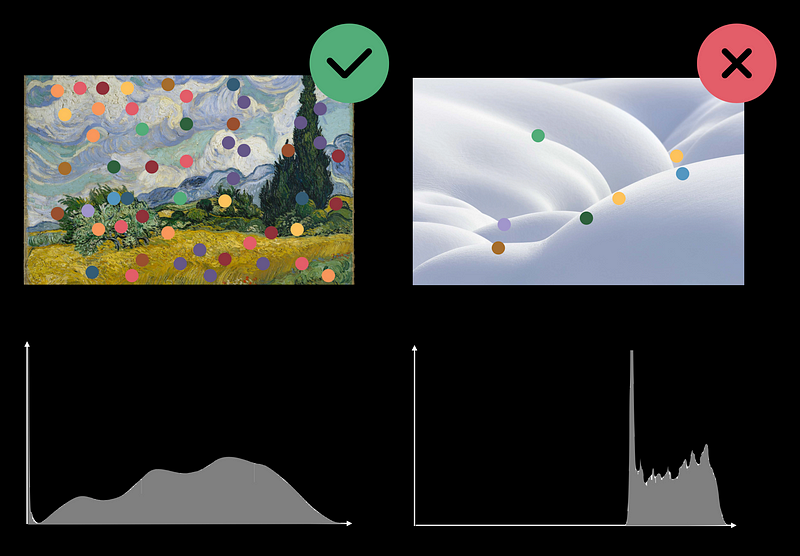
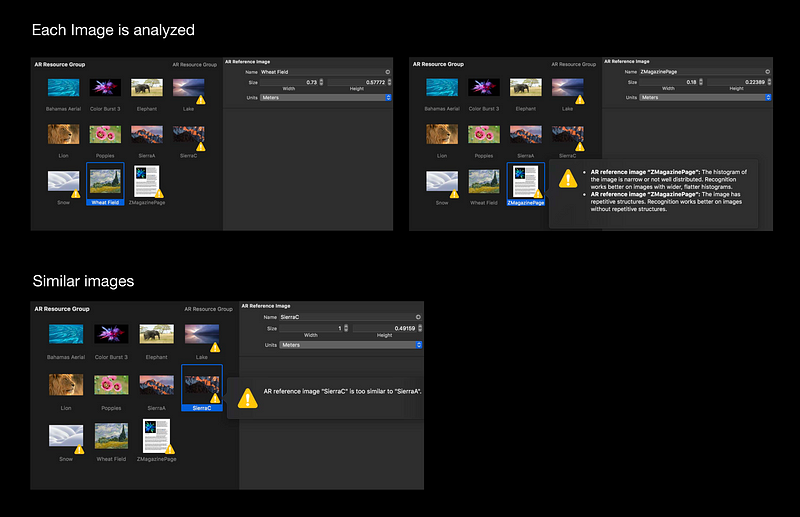
Good Images to Track
- High texture
- High local constrast
- Well distributed histogram
- No repetitive structures
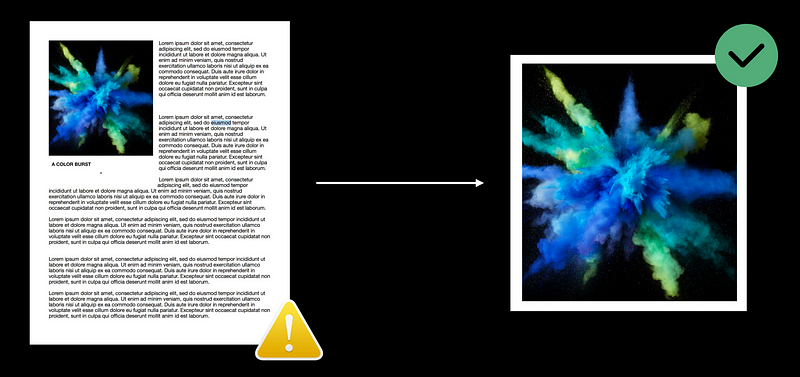
Crop image to its core content
- Allow many more images to be detected
- Max 25 images per group reccomended
- Switch between groups programmatically
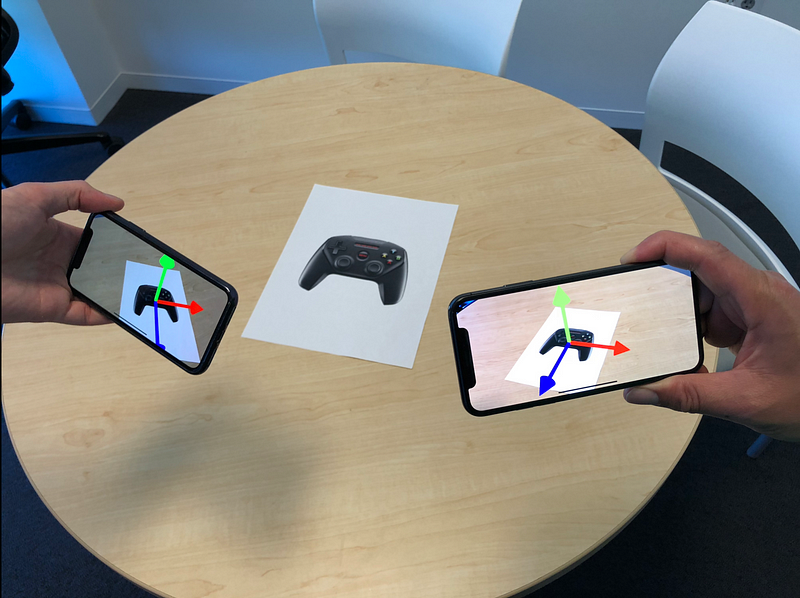
Absolute Coordinate Space for Shared ExperiencesAbsolute Coordinate Space at Precise Location- Similar representation as a world map
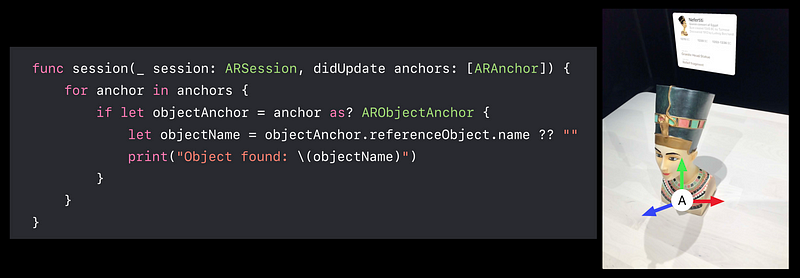
- Use “Scanning and Detecting 3D Objects”
- Detection Quality affected by Scanning Quality
Share ARReferenceObject- Rigid objects
- Texture rich
- No Reflective
- No Transparent